A Basic hydrographic survey

Survey equipment used in hydrographic surveys is described in this section. Survey equipment is continuously being developed and updated, however, the basic composition does not change. Survey equipment consists mainly of a sounding system and a positioning system.
Sounding systems
Echo-sounders
An echo-sounder is the most common sounding system used in hydrographic surveying, and it is used to measure the depth to the seafloor by using the properties of acoustic waves. The principle of echo-sounders is basic – by measuring the two-way travel time between the acoustic waves transmitted on sea surface and those reflected at seafloor. The acoustic wave propagates through sea water at approximately 1,500 m/s. For example, in the case of a measured two-way travel time being 4 seconds, the water depth is computed as 1,500 × 4 ÷ 2 = 3,000 m.
Echo-sounders are classified into two types, Single-beam Echosounder (SBES) and Multibeam Echosounder (MBES). The names of ‘single’ and ‘multi’ stem from the number of depth points measurements collected at the same time.
 Picture by Takafumi Hashimoto.
Picture by Takafumi Hashimoto.
Single-beam Echosounders (SBES)
SBES systems were developed about 80 years ago and have substantially contributed to important primary oceanographic discoveries and developments. SBES are still commonly used in hydrographic surveying. A SBES can measure only one point per acoustic echo wave (echo) emitted. The specifications of SBES are defined by beam angle and frequency of transmitted acoustic wave from the transducer. The transducer of an active sonar is able to emit and receive acoustic waves. The beam angle relates to the area the beam ensonifies at the sea floor. The frequency of acoustic wave used is related to the measurable depth, because higher frequency acoustic waves attenuate faster in the propagation process through the water column. The common SBES used in hydrographic surveys in shallow-water areas have beam angles of up to 10° with a relative high frequency echo, whereas deep water systems generally have an approximate 20° beam angle with relative low frequency echo.
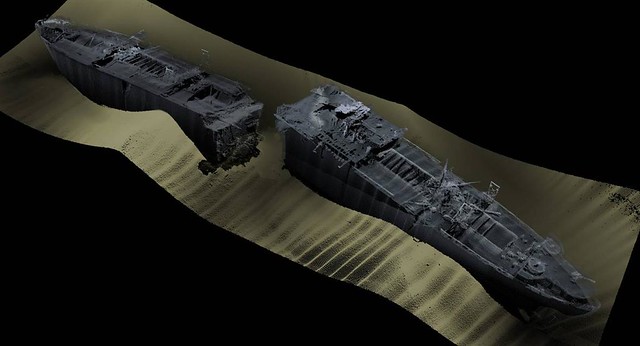
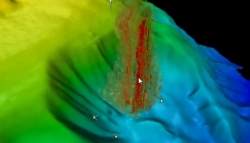
Multibeam Echosounder (MBES)
MBES systems were developed about 50 years ago, and are also commonly used in hydrographic surveys together with SBES. The basic concept of measuring of depth by MBES is the same as for SBES, but a MBES is capable of measuring many points of depth over a wide swath area at the same time. This is very important point in hydrographic surveys, particularly from the viewpoint of time and cost saving, due to the high coverage ratio of surveying. An along track line of single depth measurements can be obtained by SBES surveys, whereas a plane of depths can be collected by MBES surveys. The specifications of MBES are characterized by swath angles, in addition to the beam angle, and frequency of the acoustic wave. The swath angle is equal to the number of single beams times the beam number, giving the width of ensonified area perpendicular to the track line. In general, the specifications of common new MBES have swath angles of 150 degrees with less than a 1 degree beam angle.
Satellite Altimetry
Information about ocean bathymetry can be estimated by satellite altimetry. The principle of the satellite-altimetry bathymetry is to accurately measure the distance between the satellite and sea-surface height, where this sea-surface height is argued to approximately represent the geoid surface. If the height of the satellite is known in the geocentric coordinate system, then the sea-surface height, which is the distance between earth ellipsoid and sea surface, can be computed. Geoid height therefore give the gravitational anomaly, which is mostly produced by seafloor features in oceanic areas. One of the merits of using satellite altimetry is the huge coverage on a whole ocean scale. The world bathymetric map published by GEBCO is based on ship survey depth data combined with interpolated satellite altimetry data.Airborne Lidar bathymetry (ALB)
ALB is able to measure water depth by aircraft equipped with laser ranging system instead of survey vessel with systems that produce acoustic waves. The ALB generally transmits two types of lasers, a green laser and an infrared laser. The green laser can measure the distance between the aircraft and the sea bottom, while the infrared laser, which is absorbed by water, measures the distance between the aircraft and sea surface. The merits of ALB is that they are quick and safer surveys in shallow-water areas, when compared with surveying by vessels. Shallow-water areas measured using traditional echo-sounder methods take much longer, because the shallower the water, the smaller the ensonified area becomes and as a result it takes a long time to survey. In addition, shallow water increases the risk of stranding of survey vessels, while these problems don't arise for ALB systems. However, ALB is limited to the very shallow water (about up to 50 m) and is unable to measure depths in deeper water area due to decay of laser energy in the water column.Positioning systems
 Picture by Takafumi Hashimoto.
Picture by Takafumi Hashimoto.Position determination is also an important part of hydrographic surveys because making a map or nautical chart requires a connection between the measured depth with the accurately known position. In the early days, the position of a ship for navigational purposes was determined by geometric computation of star positions or by certain known targets on land, so called astronavigation and pilotage navigation. However, these ways of position determination include large errors and have a lot of visibility limitations (such as distance and weather condition). Radio navigation, which uses radio waves, was developed in order to overcome these limitations. In radio navigation, the ship's position is determined by solving the geometric positional relationship between the ship and multiple known ground-base stations, that are computed by the arrival times of the radio waves transmitted from these stations. The positional precision, for example, of Loran-C, which is one of radio navigation systems that was commonly used for navigation in the past was within 30 to 300 m.
Today, Global Positioning Systems (GPS) are mostly used for determining a ship’s positions. The GPS system was developed by the U.S. Defense Department in the 1970s. The principle behind GPS positioning is similar to that of radio navigation. GPS satellites are equipped with very accurate clocks and the signal transmitter, and GPS receivers on ship can receive the signal transmitted from GPS satellites. The distance between a GPS satellite and a receiver can be determine by timing the difference between transmitted and receive times. The receiver position can also be determined by computing the geometric relation among the multiple GPS satellites and the receiver at the same time. GPS positioning has few restriction, and it can be used anywhere, even in the ocean very far from land. The positional precision of GPS is approximately within 10 m. If differential GPS (DGPS) signal is available, then the positional accuracy can be accomplished within a cm order at best. In the case of DGPS, the GPS positioning is corrected by the differences between the true geodetic position and the GPS-measured position at a known reference station that is located on the nearby land at some fixed point.

Picture by Takafumi Hashimoto.
References:
- http://www.gebco.net/general_interest/faq/, (June 15, 2013)
- http://oceanexplorer.noaa.gov/history/electronic/electronic.html, (June 15, 2013)
- http://oceanexplorer.noaa.gov/history/electronic/electronic.html, (June 15, 2013)
- http://www.hydro-international.com/files/productsurvey_v_pdfdocument_30.pdf, (June 15, 2013)
- http://www.hydro-international.com/files/productsurvey_v_pdfdocument_33.pdf, (June 15, 2013)
- E.P. Baltsavias, 1998, Airborne laser scanning: existing systems and firms and other, ISPRS Journal of Photogrammetry & Remote Sensing, v. 5, p. 164–198
- http://en.wikipedia.org/wiki/Navigation, (June 15, 2013)
More learning
- http://www.hydro-international.com/productsurvey/index.php, (June 15, 2013)
- W.H.F. Smith and D.T. Sandwell, 1997, Global Sea Floor Topography from Satellite Altimetry and Ship Depth Soundings, Science, v. 277, p. 26
 On 11 June 2015, Fugro’s premier geophysical survey vessel, the Fugro Americas, successfully completed a data-collection project for a geochemical coring campaign in the Caribbean. The project marks the maiden voyage of the new-build vessel, reports Fugro.
On 11 June 2015, Fugro’s premier geophysical survey vessel, the Fugro Americas, successfully completed a data-collection project for a geochemical coring campaign in the Caribbean. The project marks the maiden voyage of the new-build vessel, reports Fugro.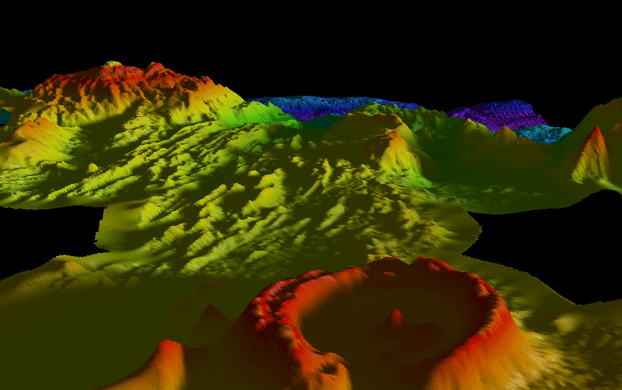


 holding pond for a natural gas fracturing operation in Texas when he was very surprised by what he found. Justin and his team use the Oceanscience (San Diego, CA) remotely-operated Z-Boat 1800 to conduct holding pond volume surveys that are crucial to effectively manage industrial process water inventories.
holding pond for a natural gas fracturing operation in Texas when he was very surprised by what he found. Justin and his team use the Oceanscience (San Diego, CA) remotely-operated Z-Boat 1800 to conduct holding pond volume surveys that are crucial to effectively manage industrial process water inventories.